レゴロボットNXTのプログラミング。
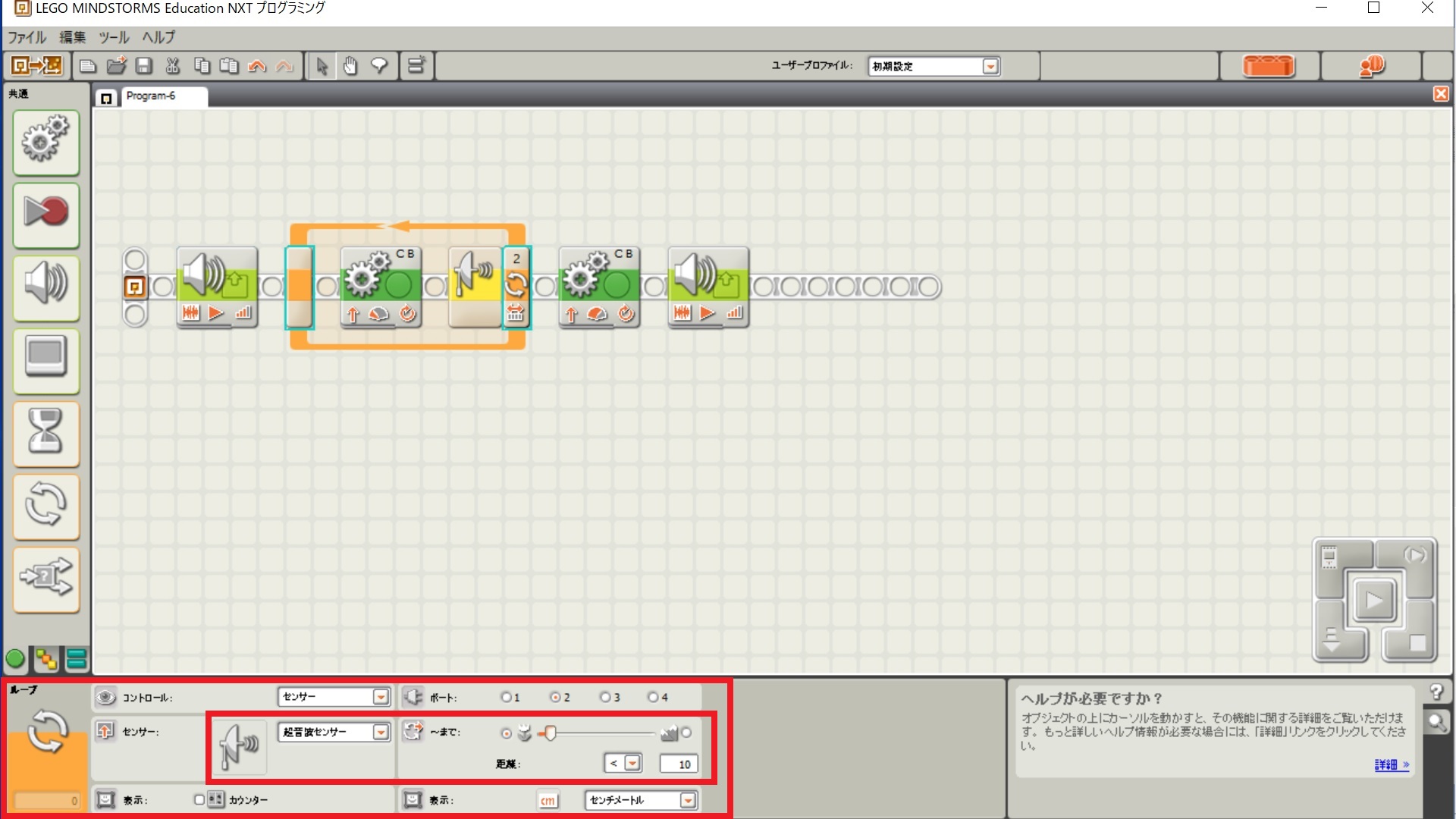
前方10cm以内に障害物があるまで、進行し続ける。
停止して終了。
条件付きのループ。
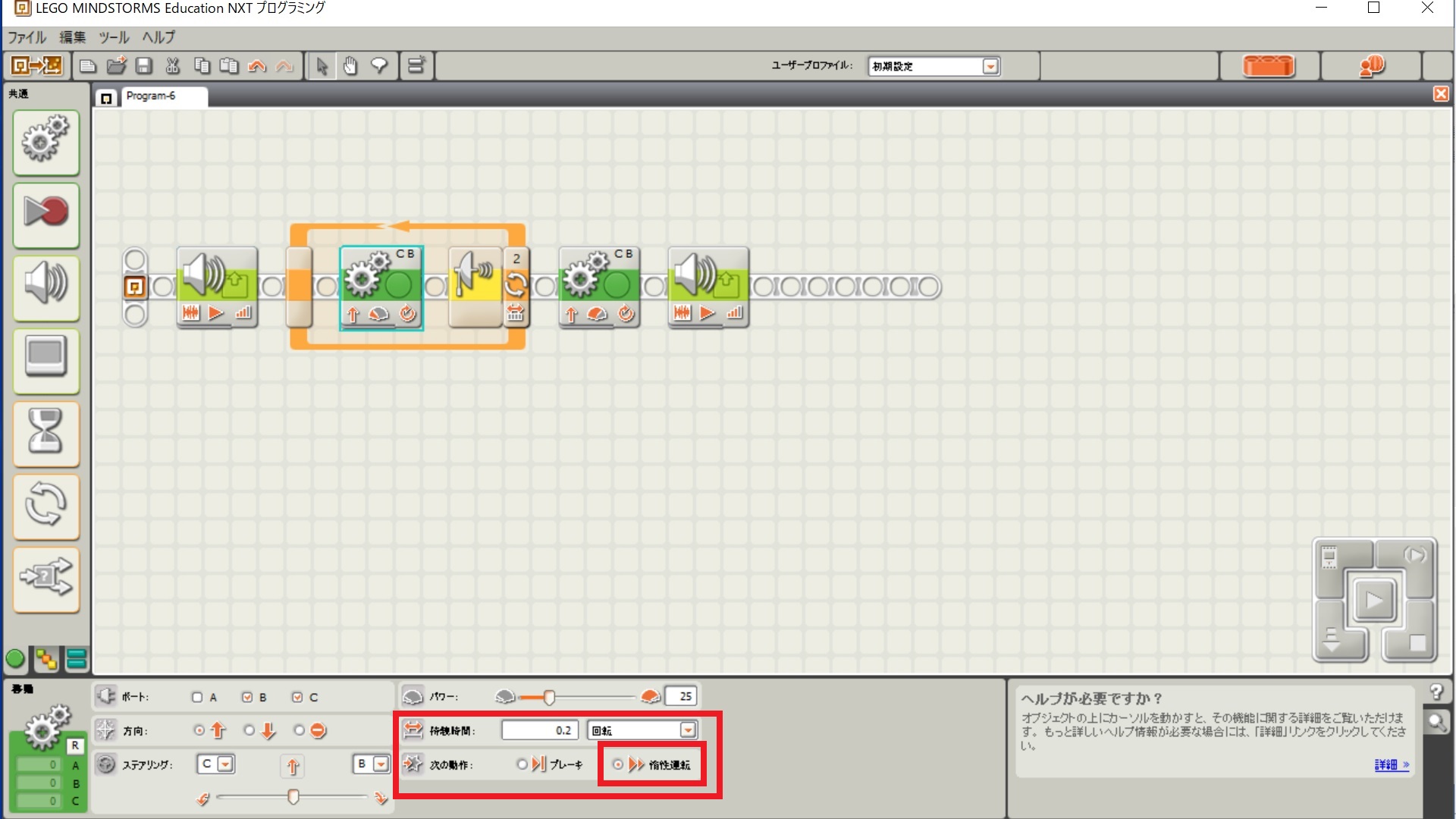
進行中のモータは、惰性進行の設定を使っている。
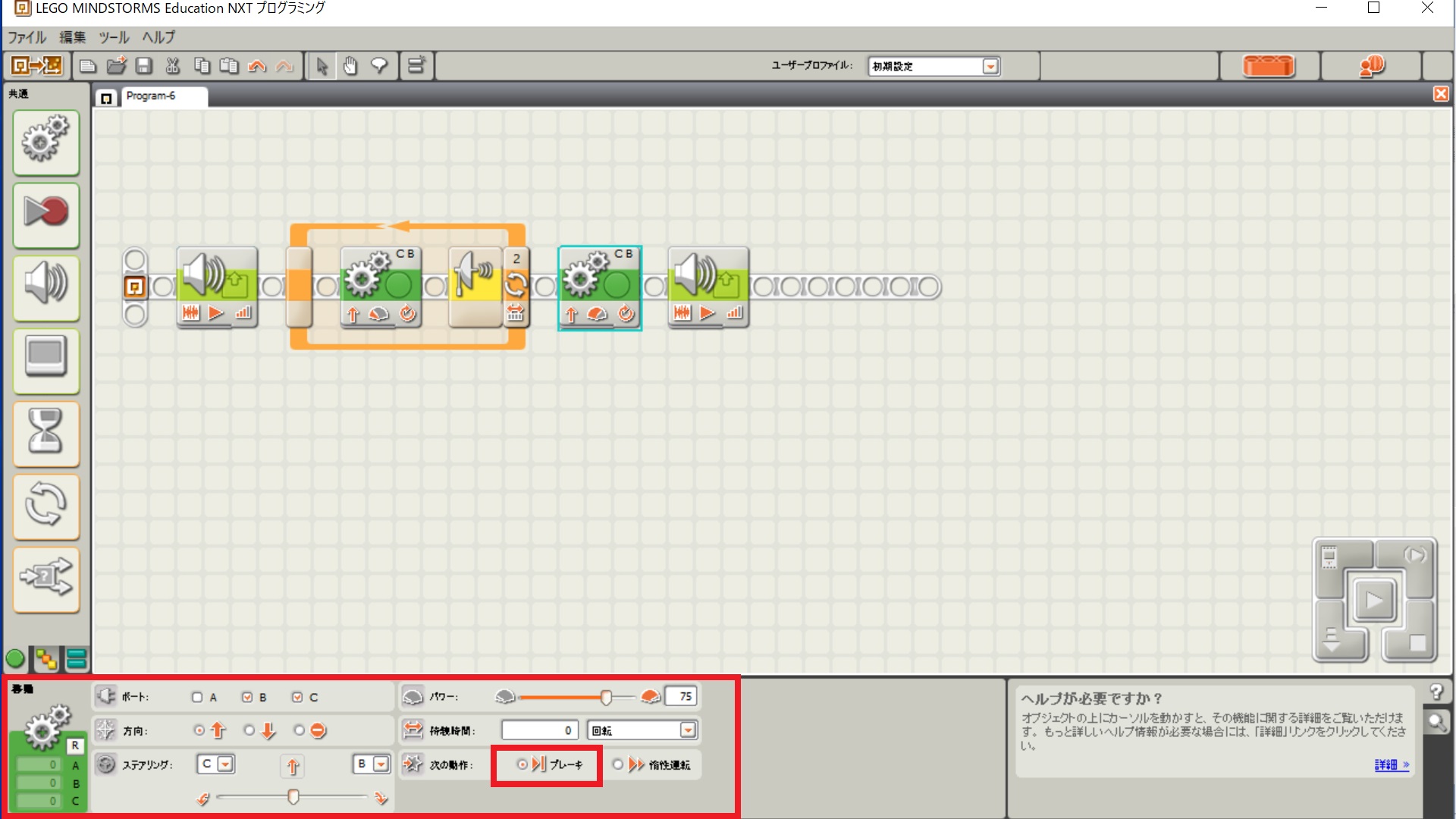
停止時は、ブレーキ機能を使う。
(2021-0301 作成)
戻る
レゴロボットNXTのプログラミング。
前方10cm以内に障害物があるまで、進行し続ける。
停止して終了。
条件付きのループ。
進行中のモータは、惰性進行の設定を使っている。
停止時は、ブレーキ機能を使う。
(2021-0301 作成)
戻る